Integration in Math: Definition, How to Calculate It, and Examples
01.12.2022 • 10 min read
Rachel McLean
Subject Matter Expert
This article is a guide on how to integrate in calculus. Learn the definition of integration, how to evaluate integrals using 4 different methods, and practice with some examples.
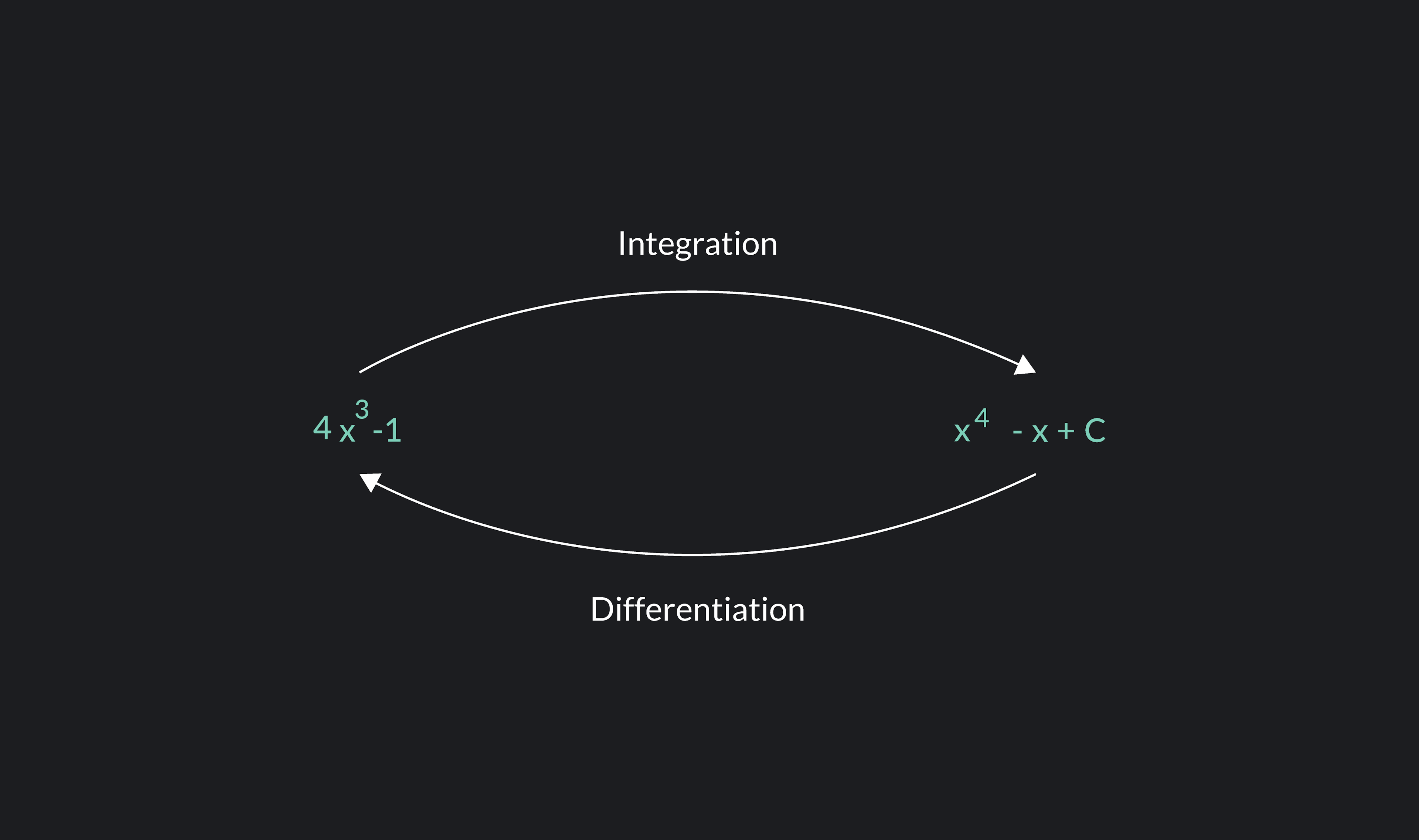
What does integration mean in math? Integration is the reverse process of differentiation. Integrating some function f(x) outputs another function, F(x). When differentiated, this function F(x) gives back the original function f(x). For this reason, the indefinite integral is often called the antiderivative. Similarly, we also refer to integration as anti-differentiation.
Let’s review the notation for integration. The indefinite integral of a real-valued function f(x) with respect to a real variable x is written as:
∫f(x)dx=F(x)+C
The symbol ∫ is called the integral sign.
The function f(x) is called the integrand. We want to find the antiderivative of this function.
The letters dx represent the differential dx. The differential dx indicates that we are integrating our function with respect to the variable x.
F(x) is the antiderivative function that results from taking the integral.
The capital letter C represents some constant value called the constant of integration.
Why is the constant of integration placed at the end of every indefinite integral?
For every f(x), we add C to its antiderivative F(x) in order to include all antiderivatives of f(x). Remember that the antiderivative provides a solution to the question, “What function F(x) gives back f(x) when differentiated?” If F(x) is the antiderivative of f(x), then their relationship looks like this:
F’(x)=f(x)
An infinite number of functions fit this bill, since the derivative of any constant is simply zero. For a simple integration example, let f(x)=2x. Observe that ∫(2x)dx=x2+C=F(x).
Now, notice the following:
If F(x)=x2+1, then F’(x)=2x
If F(x)=x2+2, then F’(x)=2x
If F(x)=x2+63, then F’(x)=2x
If F(x)=x2+100, then F’(x)=2x
No matter what constant we place at the end of the antiderivative function F(x), the derivative F’(x) is always the same; and F’(x) is always equal to the original function f(x).
Since there are an infinite number of functions F(x) whose derivative is f(x), the inclusion of C gives us a way to express the general form of the antiderivative F(x) by representing a family of infinitely many functions.
To explain more about antiderivatives, one of our instructors, Dr. Tim Chartier, talks more in depth about them:
Key Integration Formulas
Let’s review the most important rules of integration and some standard integrals. While there are many rules to memorize, don’t despair. Many follow a similar pattern. It’s worth your time to become familiar with them all.
In the following properties, assume that f and g are continuous functions.
Sum and Difference Rule
∫[f(x)±g(x)]dx=∫f(x)dx±∫g(x)dx
Constant Multiplier Rule
∫kf(x)dx=k∫f(x)dx for some constant k
Power Rule
∫xndx=n+1xn+1+C for some real number n
Constant Rule
∫adx=ax+C for some constant a
Reciprocal Rules
∫x1dx=∫x−1dx=ln∣x∣+C
∫ax+b1dx=a1ln(ax+b)+C
Exponential and Logarithmic Function Rules
∫exdx=ex+C
∫axdx=ln(a)ax+C for any positive real number a
∫ln(x)dx=xln(x)−x+C
Trigonometric Function Rules
For these rules, assume that x is in radians.
∫sinxdx=−cosx+C
∫cosxdx=sinx+C
∫sec2xdx=tanx+C
∫csc2xdx=−cotx+C
∫secxtanxdx=secx+C
∫cscxcotxdx=−cscx+C
∫1−x2dx=sin−1x+C
∫1−x2−dx=cos−1x+C
∫1+x2dx=tan−1x+C
∫sin(ax)dx=a−cos(ax)+C for some real number a
∫cos(ax)dx=asin(ax)+C for some real number a
Absolute Value Rule
∫∣x∣dx=2x∣x∣+C
Dr. Tim Chartier explains these rules more here:
How to Calculate Integrals
We’ll learn how to integrate using 4 different methods. While integral calculators do exist, it’s crucial that you understand how to integrate on your own.
1. Simplification
Before evaluating any integral, determine if the integrand can be simplified. Simplifying the integrand using trigonometric identities, algebraic identities, and cancellation of similar terms can reveal clever ways to use the rules of integration above.
For example, let’s calculate ∫x4x3−2xdx. Notice that by simplifying and using the Sum Rule, we get:
∫x4x3−2xdx=∫x4x3dx+∫x4−2xdx
=∫x1dx+∫x3−2dx
Now, we can apply the Reciprocal Rule, the Power Rule, and the Constant Multiplier Rule.
∫x1dx+∫x3−2dx=ln∣x∣−2∫x−3dx
=ln∣x∣−2(−2x−2)
=ln∣x∣+x21+C
So ∫x4x3−2xdx=ln∣x∣+x21+C.
2. Integration by Parts
We use integration by parts for evaluating the integral of a product of functions.
Here’s the integration by parts formula:
∫udv=uv−∫vdu
Integration by parts involves choosing one function in your integrand to represent u and one function to represent dv.
Here are some simple steps:
1. Choose u and dv to separate the given function into a product of functions.
2. Differentiate u to find du, and integrate dv to find v.
3. Plug u, v, and du into the integration by parts formula.
4. Solve and simplify where needed.
Generally, you choose u to be the term that’s easiest to differentiate and choose dv to be the term that’s easiest to integrate.
We’ll do one example together. Say we want to evaluate ∫xcos(3x)dx.
Step 1
Let’s choose dv=cos(3x)dx since we have an easy formula to integrate this function using the trigonometry rules above. Then, u=x since that’s what’s left over.
Step 2
Differentiating u, we have dxdu=dxd(x)=1. After multiplying both sides by the differential dx, we find that du=1dx.
Now, let’s integrate dv to find v. One of the trigonometric formulas above gives us an easy answer to this. So v=∫dv=∫cos(3x)dx=3sin(3x).
Step 3
Using the integration by parts formula, we have:
∫udv=uv−∫vdu
∫xcos(3x)dx=x⋅3sin(3x)−∫3sin(3x)dx
=3xsin(3x)−31⋅∫sin(3x)dx
=3xsin(3x)−31⋅3−cos(3x)
=3xsin(3x)+9cos(3x)+C
So ∫xcos(3x)dx=3xsin(3x)+9cos(3x)+C.
3. U-Substitution
U-Substitution unravels the chain rule for derivatives. For this reason, u-substitution is also called the Reverse Chain Rule and is used to integrate composite functions.
If you can recognize both a function and its derivative inside the same integrand, that’s a good indication that you can use u-substitution. A function where you can use u-substitution would look like this:
∫f(g(x))g’(x)dx
We want to replace substitute u=g(x) and du=g’(x) into our integrand, so that it looks like this:
∫f(g(x))g’(x)dx=f(u)du
For our example, let’s evaluate ∫(4x)e2x2+5dx. Notice that the derivative of 2x2+5 is equal to 4x, and both of these equations are present in the integrand.
So we can substitute into our integrand u=2x2+5 and du=4xdx. Then, we’ll substitute the real values back into the equation after integrating.
∫(4x)e2x2+5dx=∫eudu
=eu+C
=e2x2+5+C
So ∫(4x)e2x2+5dx=e2x2+5+C.
4. Integration by Partial Fractions
This method is useful for integrating rational functions. A rational function is a function that is written as the ratio of two polynomial functions. With this technique, we’ll decompose the integrand into several smaller rational functions.
The best way to explain this method is with an example. For our example, let’s calculate ∫2x2+9x+42xdx. First, we need to factor the denominator. Then, we can split the integrand into two rational functions with unknown numerators and add the two new rational functions together. We want to solve for A and B.
2x2+9x+42x=(2x+1)(x+4)2x
=2x+1A+x+4B
=(2x+1)(x+4)A(x+4)+(2x+1)(x+4)B(2x+1)
=(2x+1)(x+4)Ax+4A+2Bx+B
Now, we collect the x terms on one side of the numerator and collect the constant terms on the other side of the numerator. This allows us to mirror the structure of the original numerator of the integrand, 2x+0.
(2x+1)(x+4)2x=(2x+1)(x+4)(Ax+2Bx)+(4A+B)
Now, we can solve for A and B by setting up two equations:
2x=Ax+2Bx, which simplifies to 2=A+2B
This equation equates the x terms in the original integrand’s numerator with the x terms in the new rational function’s numerator.
0=4A+B
This equation equates the constant terms in the original integrand’s numerator with the constant terms in the new rational function’s numerator.
We can now solve for A and B.
Solving the system of equations with 2x=Ax+2Bx and 0=4A+B gives us A=7−2 and B=78.
We’re finally at the last step. Since we’ve found A and B, we can plug these back into our function and calculate the integral. We’ll need to use the second Reciprocal Rule.
∫2x2+9x+42xdx=∫(7(2x+1)−2+7(x+4)8)dx
=7−2∫2x+11dx+78∫x+41dx
=2⋅7−2ln(2x+1)+78ln(x+4)+C
=−71ln(2x+1)+78ln(x+4)
=78ln(x+4)−71ln(2x+1)+C
So ∫2x2+9x+42xdx=78ln(x+4)−71ln(2x+1)+C.
4 Examples of Integration
Let’s work through a few more integration examples together.
Example 1
Evaluate ∫6(x+1x2−4x−5+sinx)dx.
Solution: First, let’s break this integrand into two separate functions using the Sum Rule and apply the Constant Multiplier Rule. Then, we’ll factor the numerator of the rational expression and use the trigonometry formulas. Finally, we'll cancel similar terms and apply the Sum Rule and Power Rule:
∫6(x+1x2−4x−5+sinx)dx=6∫x+1x2−4x−5dx+6∫sinxdx
=6∫x+1(x−5)(x+1)dx+6(−cosx)
=6∫(x−5)dx−6cosx
=6∫xdx−6∫5dx−6cosx
=6⋅2x2−30x−6cosx
=3x2−30x−6cosx+C
Example 2
Evaluate ∫x4lnxdx.
Solution: We’ll use integration by parts for this problem. Let’s choose u=lnx and dv=x41dx=x−4dx. Differentiating u to find du and integrating dv to find v, we have:
du=x1dx
and
v=∫x−4dx=3x3−1
Now, using the integration by parts formula:
∫udv=uv−∫vdu
∫x4lnxdx=lnx⋅3x3−1−∫3x3−1⋅x1dx
=3x3−lnx+31∫x−4dx
=3x3−lnx+31⋅−3x−3
=3x3−lnx−9x31+C
Example 3
Evaluate ∫xsin(lnx)dx.
Solution: We can solve this problem with u-substitution. Let u=lnx. Then du=x1.
∫xsin(lnx)dx=∫sinudu
=−cosu+C
=−cos(lnx)+C
Example 4
Evaluate ∫3x2+10x+3x+1dx.
Solution: We can solve this problem with integration by partial fractions.
3x2+10x+3x+1=(x+3)(3x+1)x+1
=x+3A+3x+1B
=(x+3)(3x+1)A(3x+1)+B(x+3)
=(x+3)(3x+1)3Ax+A+Bx+3B
=(x+3)(3x+1)3Ax+Bx+A+3B
Now, we set up our two equations. One represents the x terms, and one represents the constants.
So our equations are 1=3A+B and 1=A+3B.
Solving this system of equations, we find that A=41 and B=41.
Now we can evaluate our integral using the second Reciprocal Rule.
Outlier (from the co-founder of MasterClass) has brought together some of the world's best instructors, game designers, and filmmakers to create the future of online college.