Integrals are a fundamental tool for a range of activities in fields such as mathematics, physics, and engineering. In this article, we’ll take a macro look at what integrals are, before moving on to work step by step through various possible uses.
Whereas we use derivatives in calculus to compute instantaneous rates of change of functions, integrals measure net change or total change of functions over an interval.
For example, if you were driving along an interstate highway and you had a function f(t) that measured the distance (in miles) from your starting location as a function of the time t (in hours) since you started driving, then the integral
∫24f(t)dt
would represent the total distance traveled between hours 2 and 4 of your trip.
Integrals are used throughout physics, engineering, and math to compute quantities such as area, volume, mass, physical work, and more. In this article, we’ll explore the basics behind integrals, the difference between definite and indefinite integrals, and some basic strategies for computing them.
Definite vs Indefinite Integrals
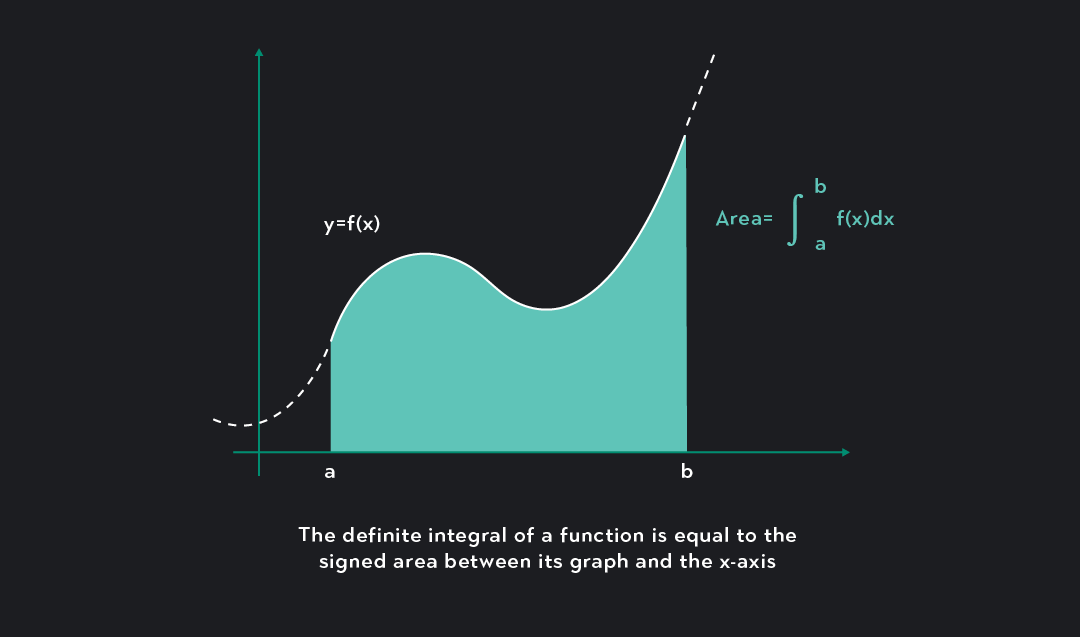
All of the various applications of integrals we mentioned in the previous section are examples of definite integrals. In general, a definite integral looks like this:
∫abf(x)dx
The mathematical definition of a definite integral is a little complicated, but in practice we can think of the notation above as representing the net change of the function f over the interval from x=a to x=b. This value happens to coincide with the signed area between the graph of f and the x-axis:
Indefinite integralsarise from the way that we typically compute definite integrals. Most of the time, we evaluate definite integrals using the Fundamental Theorem of Calculus or FTC):
∫abf(x)dx=F(b)−F(a) where F′(x)=f(x)
In words, to evaluate the integral of a function f over an interval a≤x≤b, we need to find a function F whose derivative is f; evaluate that function at the two endpoints of the interval; and then subtract those two values. For example, to compute an integral of the function f(x)=x2, we could use the function F(x)=31x3, since the derivative of the latter is x2:
∫13x2dx=31(3)3−31(1)3=326
The function F used in the FTC is called an antiderivativeof f: it’s a function whose derivative is f. This is where indefinite integrals come in: we use the notation
∫f(x)dx
for the general antiderivative of f. Based on the example above, we would have
∫x2dx=31x3+C
where the extra "+C" term is there to take into account all of the functions whose derivative are x^2.
In summary: definite integrals—those with bounds on the integral symbol—are extremely useful for computing areas and net changes of functions, and we can extend them to compute other quantities, such as mass and volume. To actually evaluate a definite integral, however, we need to find an indefinite integral (i.e., an antiderivative).
Integrals of Common Functions
The process of computing antiderivatives can be tricky, as it’s not as algorithmic as finding derivatives. Fortunately, to get us started using integrals, there are a few functions for which finding the antiderivative is not too difficult. Here are the indefinite integrals of some simple functions that you’ll encounter frequently.
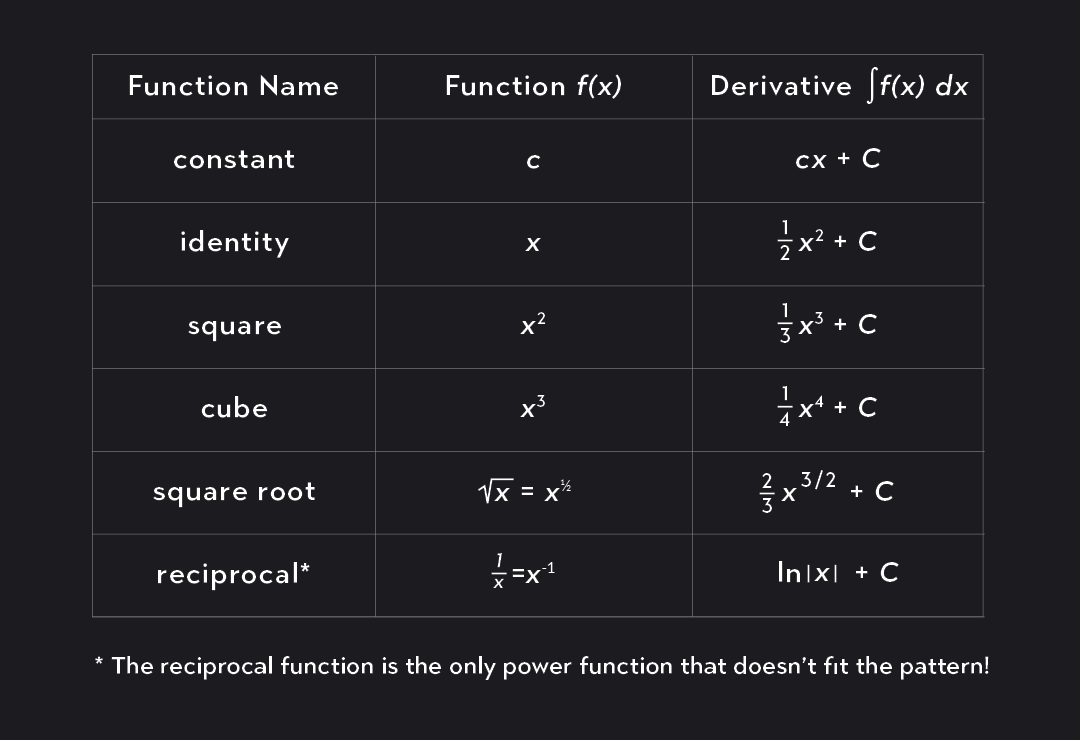
Integrals of Power Functions
Just like derivatives, there’s a “Power Rule” for integrals. Can you guess what it is from the pattern in this table?
We'll cover the general rule in greater depth below, in the Power Rule section.
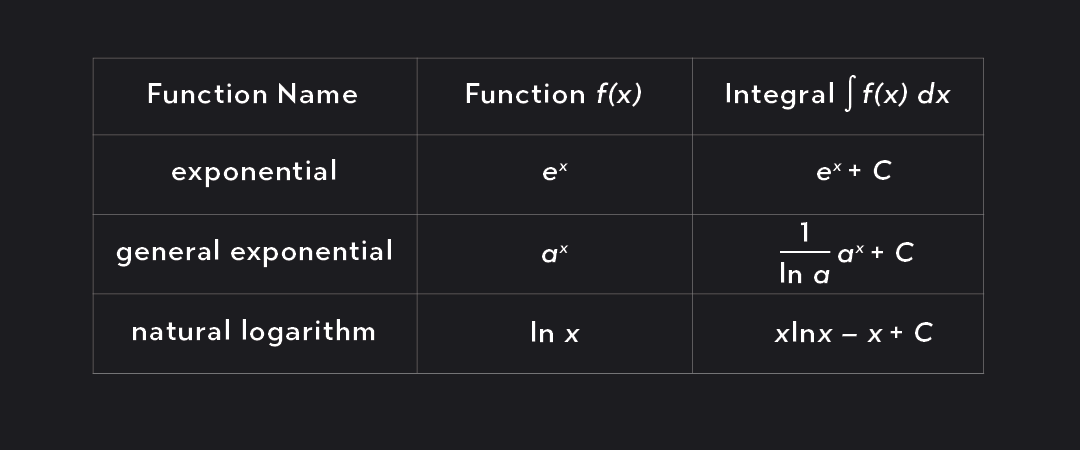
Integrals of Exponential and Logarithmic Functions
The exponential and logarithmic functions play key roles throughout both theoretical and applied mathematics. Notice that because ex is its own derivative, it’s also its own antiderivative!
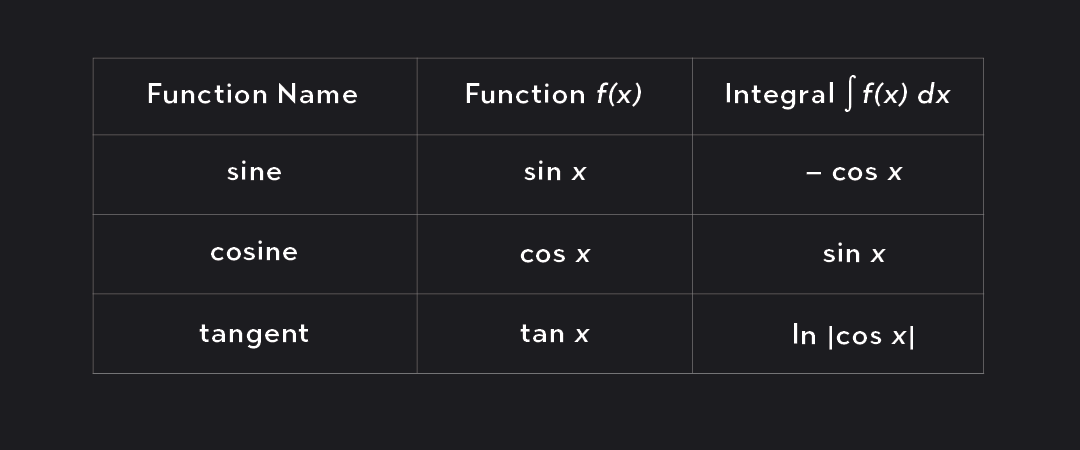
Integrals of Trigonometric Functions
Trigonometric functions are useful in any situation that involves periodicbehavior, where a function takes on the same values in repeating intervals.
As with derivatives, there are a handful of rules we can use to find antiderivatives of complicated functions based on our knowledge of simpler antiderivatives. For each rule, we’ve provided a few examples to show how it works.
The Power Rule
The Power Rule for integrals is something of an opposite to the usual Power Rule for differentiation:
∫xkdx=k+11xk+1+C
Notice that this doesn’t work if k=−1, since then we have division by zero on the right side of the equation. (The antiderivative of x−1 is shown in the table in the previous section.) Here are a couple examples of the Power Rule:
∫x5dx=5+11x5+1+C=61x6+C
∫x31dx=31+11x31+1+C=43x34+C
The Sum, Difference, and Constant Multiple Rules
Because derivatives and integrals are closely related, they obey some similar algebraic properties. In particular, integrals follow the same rules regarding sums, differences, and constant multiples of functions:
∫(f(x)+g(x))dx=∫f(x)dx+∫g(x)dx
∫(f(x)−g(x))dx=∫f(x)dx−∫g(x)dx
∫cf(x)dx=c∫f(x)dx
So the integral of a sum or difference is the same as the sum or difference of the integrals, and we can “pull” constants outside of integrals. Here are a couple examples of those three rules used together:
∫(ex−sinx)dx=∫exdx−∫sinxdx=ex−(−cosx)+C=ex+cosx+C
∫(6x3+5x2−4x)dx
=6∫x3dx+5∫x2dx−4∫xdx
=6(41x4)+5(31x3)−4(21x2)+C
=23x4+35x3−2x2+C
Integration by Substitution
This is probably the most useful rule for computing integrals, even though it takes some time to master it. On paper, the formula for substitution is, once again, an opposite of sorts, this time to the Chain Rule for derivatives:
∫f′(u(x))u′(x)dx=f(u(x))+C
We can apply substitution to an integral whenever we can identify a piece(u(x)) of the integrand whose derivative <katex>\left(u'\left(x\right)\right)also appears in the integrand. Let’s work through an example to see how this goes. This time, we’ll find the indefinite integral of:
∫2xexdx
Notice that the integrand 2xex fits the criterion for using substitution: if we define u(x)=x2, then the derivative u′(x)=2x also appears in the integrand. So we substitute u=x2 into this integral. We replace x2 with u and 2xdx with du:
∫2xex2dx→∫eudu
This leaves us with a simpler integral that we can compute (using the tables above, for instance):
∫eudu=eu+C
To finish the process, we plug u=x2 back into the antiderivative we found:
∫2xex2dx=ex2+C
(Remember, the goal with integrals is to find functions whose derivatives are the functions we are given. So we can always check our work by taking the derivative of our result, dxd(ex2+C)=2xex2 via the Chain Rule, to see if we get the function we started with.)
Here’s another example. Let’s compute
∫x2−1xdx
We’d like to substitute u=x2−1 here, but the derivative of that is 2x, which doesn’t appear in the integrand. However, we can rewrite the integral in a clever way to make that happen:
∫x2−1xdx=∫21x2−12xdx
Now we can substitute u=x2−1 and du=2xdx, which simplifies the integral into something we can compute using the Power Rule:
Outlier (from the co-founder of MasterClass) has brought together some of the world's best instructors, game designers, and filmmakers to create the future of online college.